
Design of non-planar print paths for robotic 3D printing
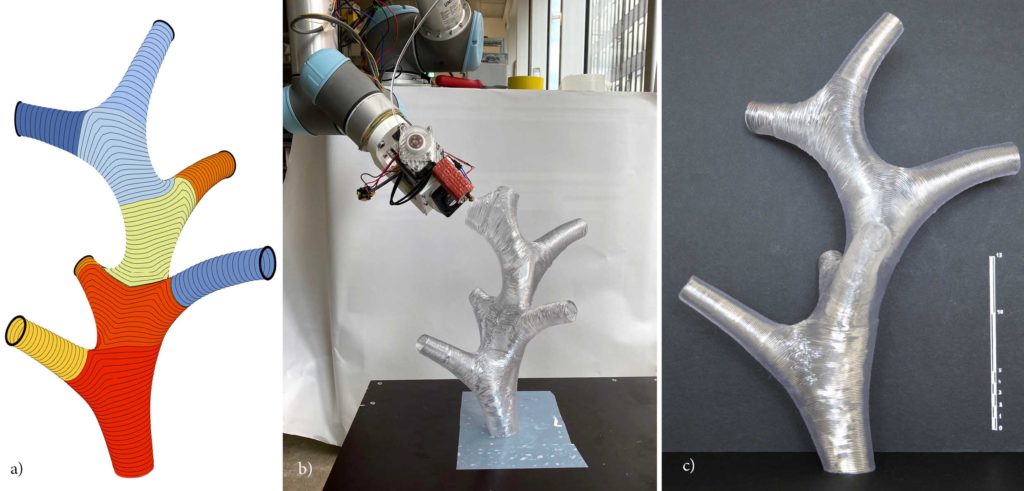
With the advent of robotic printing, it is possible to print material along 3D paths with variable orientation and thickness. Consequently, paths can be customized to enhance aesthetic or practical attributes such as surface quality or mechanical performance. However, there is a lack of methodologies for designing robot-fabricable, non-planar print paths. This research aims to address this gap with a focus on creating intuitive path design tools within the reach of designers and on considering fabrication constraints inherent to non-planar robotic 3D printing.
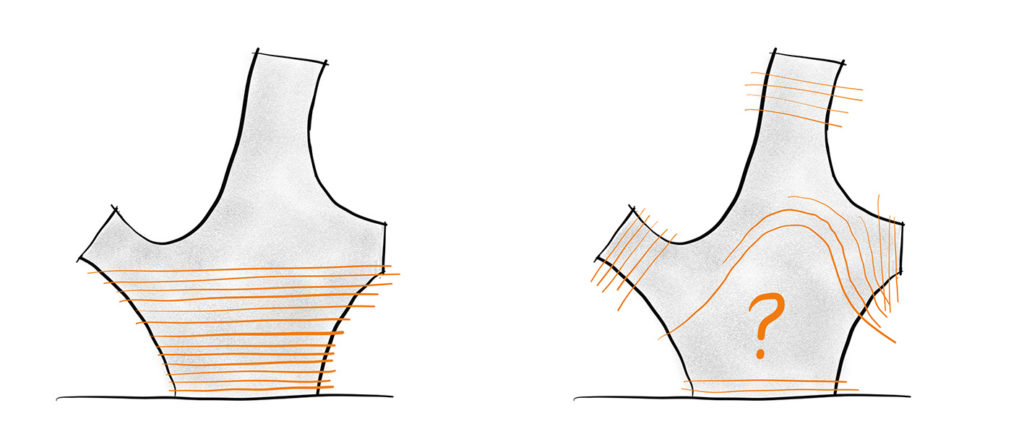
Inspired by the ubiquitous key-framing technique in animation, where an input of limited degrees of freedom is used to describe a complex behavior, non-planar paths subject to the designer’s input are generated by interpolating a series of target curves on the surface of a mesh. This interpolation generates intermediary print paths with a direction that interpolates that of the targets. The resulting print paths have variable layer height, and their realization relies on variable end-effector orientation.




Acknowledgments
This research has been part of my doctoral research titled Nonplanar Layered Morphologies at ETH Zurich, at the Institute of Technology in Architecture, chair of Digital Building Technologies, under the supervision of Prof. Benjamin Dillenburger.
Additional advisor: Mathias Bernhard.
The outcomes of this research have been summarized in the following publications;
Ioanna Mitropoulou, Mathias Bernhard, Benjamin Dillenburger. 2021. Nonplanar 3D Printing of Bifurcating Forms. 3D Printing and Additive Manufacturing. 10.1089/3dp.2021.0023.